
In der öffentlichen Diskussion hört man häufiger, dass die Einführung von flächendeckenden 5G Mobilfunknetzen Voraussetzung für autonomes Fahren sei (also selbstfahrende Autos).

{kind=link}
Diese Aussage stimmt so allerdings nicht. Das findet auch der angesehene VDI Verein Deutscher Ingenieure e.V. Aber lassen Sie uns der Sache einmal auf den Grund gehen. Tatsächlich werden hier zwei Dinge miteinander vermischt:
- das selbstfahrende Auto an sich
- die Erhöhung der Sicherheit im Straßenverkehr
Würde obige Aussage stimmen, so könnte ein autonomes Auto nur dann sicher fahren, wenn es über eine 5G Mobilfunkverbindung verfügt. Eine vollständige Abdeckung aller Winkel des Landes unter allen Wetterbedinungen ist aber technisch (zumindest aber ökonomisch) unmöglich. Selbst wenn diese gegeben wäre, könnten sich durch Störungen Unterbrechungen ergeben. Als Beispiel sei der berühmte Bagger genannt, der die Datenverbindung des Mobilfunk-Sendemasts unterbricht. Um die Anforderungen an vollautonomen Fahrbetrieb zu erfüllen, muss das Auto auch unter diesen Bedingungen noch sicher zum Stand kommen („sicherer Betriebszustand“). Geht man von einer solchen Störung im Autobahnbetrieb aus, so muss das Fahrzeug auch ohne Netzverbindung über mehrere Sekunden einen sichereren Fahrbetrieb ermöglichen – inklusive Kurven-, Hindernis- und Umfeldverkehrserkennung.
Definition autonomes Fahren
Man liest Definitionen an verschiedenen Stellen, bis auf kleine Unterschiede sind sie deckungsgleich. Es werden verschiedene Stufen oder Level definiert. Dabei ist Stufe 0 (auch G0 genannt) das Fahren komplett ohne Assistenzsysteme. Stufe 5 (G5) ist das vollautomatische Fahren, das keinen menschlichen Fahrzeugführer mehr benötigt. Die Zwischenstufen ermöglichen teilautomatischen Betrieb. Unter G2 wird üblicherweise z.B. ein adaptiver Tempomat mit der Möglichkeit zum eigenständigen Bremsen, Spurhalten und ggfs. Stau-Anfahrfunktion verstanden – heute schon so verfügbar. Automatischer Betrieb wird oft schon in Stufe 4 angenommen, hier aber noch mit gewissen Einschränkungen. Z.B. kann es erforderlich sein, dass das Einsatzgebiet umfassend kartiert ist. Wichtig: ab Stufe 4 muss das Fahrzeug in der Lage sein, im Notfall aus allen automatischen Betriebssituationen in einen „sicheren Zustand“ zu gelanden. Hierunter ist eigentlich fast immer der Stillstand, möglichst ausserhalb der Fahrspur, zu verstehen.
Ziehen wir einmal die Norm SAE J3016 zu G5 heran. Dort wird gefordert: „the full-time performance by an automated driving system of all aspects of the dynamic driving task under all roadway and environmental conditions that can be managed by a human driver„. Auf gut Deutsch: das automatische Fahrsystem muss alle Fahrfunktionen unter allen Straßen- und Umgebungsbedingen gleich gut wie ein menschlicher Fahrer beherrschen können.
Kurz und knackig: ein Mensch kann ein Fahrzeug problemlos bei Ausfall des Mobilfunknetzes beherrschen. Folglich muss ein G5 System dazu auch in der Lage sein! Klingt trivial, ist aber im Hinblick auf die eingangs geschilderte Situation des Mobilfunkausfalls im Autobahnbetrieb in der Tat nicht ganz unwesentlich.

Selbstfahrende Autos nicht besser als der Mensch!
Allerdings: es ist nicht gefordert, dass das Fahrsystem besser ist als der Mensch. Dieser Fakt hat im Juli 2016 gewisse Berühmtheit erlangt, als das von Tesla verbaute Fahrsystem geblendet wurde und daraufhin einen fatalen Unfall baute. Die Süddeutsche Zeitung hat dazu einen lesenswerten Artikel verfasst. Beim Lesen achte man insbesondere auf die Schilderung der im Fahrzeug verbauten Sensorik, die eben gerade den sicheren Fahrbetrieb ermöglicht – auch ohne Netzanbindung.
Der Unfall ist eigentlich kein wirklich gutes Beispiel, denn das Tesla-System ist gar nicht für vollautomatisches Fahren freigegeben. Er zeigt aber dennoch die Grenzen. Kernursache war hier vermutlich tatsächlich eine „Blendung“ des technischen Systems, das durch zu geringen Kontrast und starkes Licht die Kollision nicht richtig erkannt hat. Hätte dies in ähnlicher Situation auch einem Menschen passieren können? Vermutlich ja.
Autos sprechen untereinander
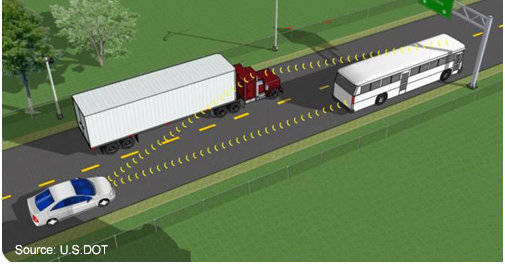
Wenn wir nun höhere Sicherheit wünschen, verlassen wir so langsam das reine Feld des autonomen Fahrens. Mit technischen Mitteln lässt sich die Sicherheit bedeutend verbessern. Zum Beispiel könnten die Autos untereinander kommunizieren („vehicle to vehice communications“, „V2V“ genannt). Dadurch wird es möglich, das Bremsmanöver eines mehrerer Fahrzeuge Vorausfahrenden zu erkennen und vorausschauend auch den Bremsvorgang bei allen Nachfolgern einzuleiten.
{kind=link}
Solche technischen Neuerungen, wenn auch nicht so umfassend, kennen wir aus der Vergangenheit: beispielsweise die Einführung des ABS. Damals wie heute gab und gibt es aber das Problem, dass nicht schlagartig alle Fahrzeuge die neue Funktion unterstützen. So war es für den nicht-ABS bestückten Nachfolger damals durchaus schwierig, mit seinem ABS Vordermann rechtzeitig zum Stand zu kommen.
Künftige technische Systeme müssen auch mit einem Umfeld umgehen können, in denen eine Vielzahl, oder auch nur einige (Oldtimer!), Fahrzeuge nicht über die entsprechenden Kommunikationsmöglichkeiten verfügen. Die Sicherheit für alle Verkehrsteilnehmer darf dadurch nicht beeinträchtigt werden. Insofern kann V2V Kommunikation in den kommenden Jahrzehnten sicherlich nicht vorausgesetzt werden.
… und mit der Infrastruktur
Weitere Verbesserungen ergeben sich, wenn das Fahrzeug mit der Infrastruktur kommunizieren kann. Das wird „vehicle to infrastructure“ („V2I“) genannt. Hierunter man die Kommunikation mit z. B. Ampeln, Verkehrszeichen oder sonstige Sensoren aller Art. Beispiele für letzteres sind der Windmesser einer Autobahnbrücke (besonders interessant für LKW) oder auch ein Fahrbahntemperatur-Sensor, der mögliche Vereisung anzeigt. Dieser Kommunikation ist gemeinsam: ist sie vorhanden, wird die Sicherheit erhöht und ebenso die Energieeffizienz des Verkehrs. Notwendig darf sie aber nicht sein.
Nehmen wir einmal das Beispiel Ampel. Auch ohne Kommunikation muss das Fahrzeug erkennen können, ob grün oder rot angezeigt wird – und entsprechend reagieren. Mit Kommunikation kann das Fahrsystem jedoch frühzeigtiger einen Status erhalten. Weiß man, dass die Ampel in 2 Sekunden auf rot umschalten wird, so kann man anhand der aktuellen Geschwindigkeit berechnen, ob frühzeitiges ausrollen lassen angebracht ist. Das verringert den Energiebedarf, hält den Verkehr als ganzes flüssiger und erhöht auch die Sicherheit (durch weniger unerwartete und scharfe Bremsmanöver).
Denkt man dieses Beispiel zu Ende, so wäre auch beim manuellen Fahren eine solche Anzeige sinnvoll. Gäbe es im Navi eine solche Anzeige der Umschaltdauer der Ampel, so könnte auch der menschliche Fahrer besser reagieren. Man sieht: diese Funktionen bringen einen Zusatznutzen. Sie stehen aber nicht ursächlich im Zusammenhang mit autonomem Fahren und sind sicherlich dafür nicht unabdingbar.
Verkehrszeichenerkennung
Ganz kurz sei noch das Beispiel Verkehrszeichen angesprochen: hier sieht man mittlerweile schon in der unteren Mittelklasse, dass optische Erkennung („Computersehen“) tatsächlich schon funktioniert und Vorteile bieten kann. Im z.B. neuen Renault ZOE (und vermutlich vielen weiteren Renault Modellen mit gleicher Elektronik) kann die Verkehrszeichenerkennung darüber hinaus auch schon die im Tempomat eingestellte Maximalgeschwindigkeit dynamisch verändern. Das ist ein Paradebeispiel dafür, wie nicht auf Mobilfunknetze gestützte Assistenzsysteme heute schon im Alltagsleben angekommen sind.

Noch einmal zurück zur Mobilfunknetzanbindung der Infrastruktur: wie lange wird es wohl dauern, bis alles umgerüstet ist? Von wie langen Übergangszeiträumen wird man wohl ausgehen müssen?
Eigentlich sprechen Autos mit überhaupt Allem!
Bleibt das Schlagwort „vehicle to everything“ („V2X“). Dabei „spricht“ das Auto mit allem und jedem in seiner Umgebung. Besonders erwähnenswert sind hier Radfahrer und Fußgänger, die durch Aussendung (hochpräziser) Standortdaten in Entscheidungen des Fahrsystems berücksichtigt werden können. Insbesondere ist es damit möglich, visuell unsichtbare Verkehrsteilnehmer zu beachten. Das verbessert die Sichtbarkeit ganz erheblich. Mobilfunknetze sind dafür nicht erforderlich. Das kann man beispielsweise beim Verband der Automobilindustrie nachlesen. Im Gegenteil, der VDA weist beipielsweise darauf hin, dass Überlastungssituationen, wie sie im Mobilfunk immer mal wieder auftreten, mit V2X schwer vereinbar sind.
Übrigens: die mittlere Nutzungsdauer von Smartphone beträgt nur zwischen zwei und drei Jahren [vgl. auch PROSA Studie des Öko Institut, S. 17; Studie des Umwelt-Bundesamtes, S. 28]. Damit erscheint es wahrscheinlich, dass Smartphone-basierende Kommunikationslösungen kurz- bis mittelfristig zu einem großen Anteil in ein intelligentes Verkehrsmanagement integriert werden können. Und damit sicherlich weit früher, als dies bei Infrastruktur-Anbindungen der Fall sein dürfte.
Kommunikation erfordert keinesfalls 5G Mobilfunk
Wie teilweise schon genannt ist der 5G Netzausbau sicherlich eine Option für die Vernetzung aller Teilnehmer – keinesfalls aber die einzige. Das Bundesministerium für Verkehr und Infrastruktur macht auf S. 10 der „5G-Strategie für Deutschland“ folgende bemerkenswerte Aussage (Hervorhebung durch den Autor): „Mit dem automatisierten und vernetzen Fahren erhöhen wir die Sicherheit im Straßenverkehr und verbessern den Verkehrsfluss, so dass Ressourcen geschont und schädliche Emissionen verringert werden.„. Es handelt sich um qualitative Kriterien – das vernetztes Fahren für Automatisierung unabdingbar ist, wird (richtigerweise) nicht behauptet.
Ausbau des 5G Netzes

{kind=link}
Wäre der 5G Ausbau tatsächlich notwendig für autonomes Fahren, so würde sich autonomes Fahren auf absehbare Zeit in Deutschland nicht realisieren lassen. Verfügen wir in Deutschland doch über eines der schlechtesten Mobilfunketze weltweit. Die Ausbauziele der Bundesnetzagentur sehen lediglich die Versorgung von 98% der Bevölkerung mit 100MBit/S vor. Dazu ist 5G nicht einmal erforderlich. Abgesehen davon ist das Ausbauziel nicht an der Fläche orientiert. Entsprechend umfangreich ist die Kritik auch allenthalben ausgefallen. Den Mobilfunkanbietern hingegen ist selbst dieses geringe Ausbauziel zu ambitioniert, wie man der Reaktion des Branchenverbands Bitkom entnehmen kann.
Der ehemalig Daimler-Chef Zetsche geht in einem Video seines Unternehmens (bei Minute 3:55) daher auch davon aus dass „wir in absehbarer Zeit kein Flächendeckendes Mobilfunknetz haben werden“ (siehe auch Bericht dazu). Das Video ist übrigens auch prinzipiell interessant in Bezug auf autonomes Fahren.
Dieses Video ist bei YouTube gespeichert. Um es zu sehen, müssen Sie daher der Verbindung zu YouTube zustimmen. Hierdurch werden Daten an YouTube übertragen. Ihre Zustimmung wird 30 Tage in einem Cookie gespeichert. In dieser Zeit wird sofort eine Verbindung aufgebaut. Erst danach werden Sie wieder um Ihre Zustimmung gebeten.
Weitere Details zu YouTube finden Sie auch in unserer Datenschutzerklärung.
Andere Kommunikationstechnologien
Es gibt eine Vielzahl von anderen Möglichkeiten zum vernetzten Fahren. Der Branchendienst Teltarif hat hierzu einen schönen zusammenfassenden Artikel. Im Detail sei nur beispielhaft auf ITS-G5 (basierend auf WLAN 802.11p) verweisen, z.B. bei der Europäischen Union. Auch LTE wird beispielsweise in diesem Umfeld eingesetzt.
Eine Übersicht über verschieden Kommunikationsmöglichkeiten gibt es zum Beispiel beim Fraunhofer Institut, S. 25ff (in Verbindung mit dem Testfeld Berlin).
Was macht denn dann ein selbstfahrendes Auto aus?
Im Daimler-Video bringt Hr. Zetsche bei ca. 4:20 eine sehr schöne Definition: Für vollautomatischen Betrieb „müssen die Fahrzeuge zunächst einmal wirklich autonom sein, d. h. sie müssen ohne Kommunikation einen top Job machen„.
Wenn man das saloppe „top Job“ mit „sicher fahren“ synonym setzt, ist damit schon alles gesagt. Wichtig ist insbesondere die Aussage, dass dies „ohne Kommunikation“ erfolgen muss. Anders gesagt: sämtliche Technik muss im Fahrzeug selbst verfügbar sein. Im technischen Detail ist anzumerken, dass dies auch notwendige Voraussetzung dafür ist, um die harten Realzeitanforderungen an sicherheitskritische Systeme zu erreichen.
Ein selbstfahrendes Auto benötigt also eine Vielzahl von Sensoren, z.B. Kameras zur visuellen Umgebungserkennung, ggfs. Kameras im nicht-visuellen Spektrum, Abstandssensoren (Radar, LIDAR), Inertialsensoren, etc. Einzige notwendige Verbindung zur Aussenwelt ist der Empfang von Navigationssatelliten, um die Wegstrecke dauerhaft zu erkennen. Aber selbst ein Ausfall dieser Anbindung (Tunnel!) darf nicht zum sofortigen Systemversagen führen. Er kann mit geeigneter Sensorik eine gewisse Zeitspanne überbrückt werden. Mindestens aber ist ein sicheres Anhalten auch ohne Satellitennavigation und nur anhand der on-board Technik möglich.
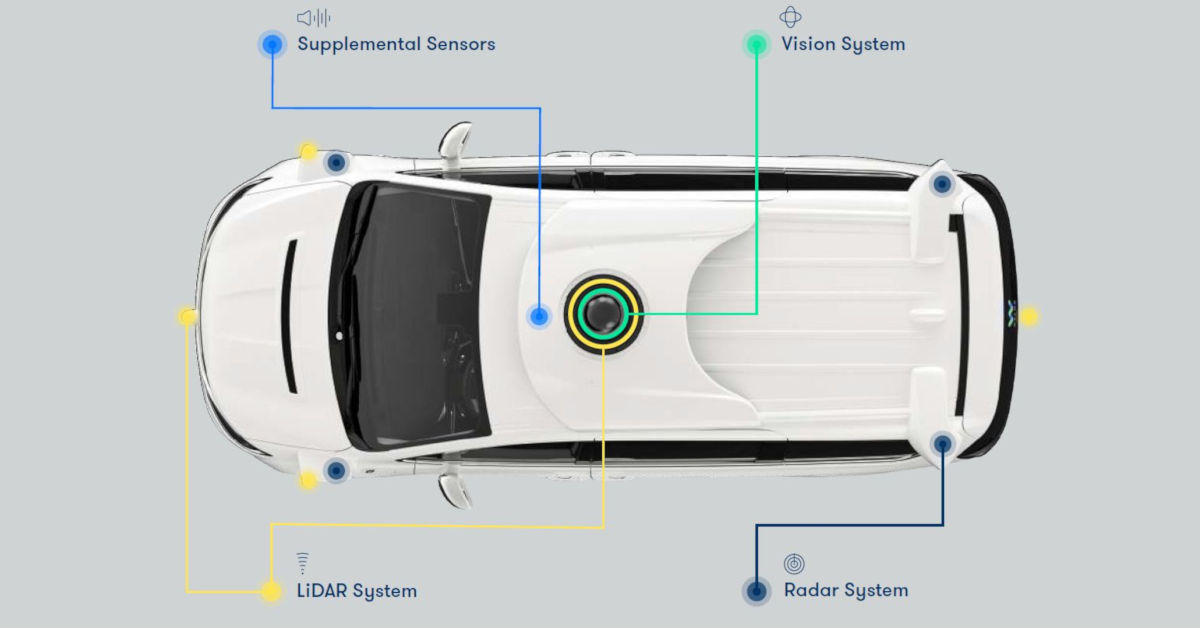
Der technische Aufwand ist hoch, mittlerweile aber durchaus beherrschbar. So bietet Waymo, ein Alphabet (Google) Unternehmen bereits heute Dienstleistungen auf Basis weitgehend autonomer Fahrzeuge (Stufe 4) an. In einem Prospekt wird umfangreich dargestellt, wie autonomes Fahren bei Waymo realisiert wird. Wer sich die Mühe macht die Beschreibung vollständig zu lesen wird feststellen: es wird sehr viel Sensorik beschrieben. Die Notwendigkeit einer externen Netzanbindung wird hingegen nirgends erwähnt.
Selbstfahrende Autos und 5G Mobilfunk – Fazit
Autonome Fahrzeuge profitieren sicherlich von Netzanbindungen. Voraussetzung sind sie aber genauso sicher nicht. Tatsächlich muss man das automatisierte vom (Netz-)verbundenen Fahren trennen. Auch Fahrzeuge geringerer Automatisierungsstufen können vom „connected driving“ profitieren.
Die Schaffung von Verbindungen zwischen Fahrzeugen, Infrastruktur, Fußgängern, Radfahrern und sonstigen Objekten bietet große Vorteile im Hinblick auf Sicherheit und Energieeffizienz. Solche Vorteile können durchaus auch im Rahmen von heute prinzipiell verfügbaren Automatisierungen auf Stufe 2 genutzt werden. Beim dynamischen Tempomaten lassen sich so die Risiken der Kollonenfahrt reduzieren bei gleichzeitiger Erhöhung der Energieeffizienz. Ebenso können Notbremssysteme durch „Informationen von Aussen“ sicherer werden.
Für die externe Kommunikation können Mobilfunknetze genutzt werden. Dies ist aber nicht immer möglich und auch nicht immer sinnvoll. Ad-hoc Netze wie ITS-G5 bringen oft bessere Ergebnisse bei größerer Verfügbarkeit.
Der Einsatz von Mobilfunknetzen der fünften Generation mag aus verschiedenen Gründen attraktiv sein. Im Hinblick auf die in Deutschland geltenden Ausbauziele (und kommunizierten Ausbauanstrengungen der Provider) ist er wirklich flächendeckend sicherlich nicht nicht in der nächste Dekade zu erwarten. Alleine daher scheidet 5G als zwingende Grundlage des vernetzten Fahrens aus – und weit mehr noch als notwendige Voraussetzung des autonomen Fahrens.